Modeling of the existing process automation system. Automation and simulation of the technological process
At present, in the conditions of market relations, the priority, fundamental tasks in the field of agricultural production are the intensification of existing production processes, improving product quality, saving materials and energy and, ultimately, improving the energy efficiency of technological systems. The identification of production reserves or a specific process, as a rule, is associated with its analysis based on modern research methods and modern technical means(in particular, using the MATCAD software package). At the same time, special attention is paid to models of technological processes and methods for their construction.
Modeling of technological processes
When solving a number of problems related to the design, preparation and operation of technological processes in the agro-industrial complex, they resort to their modeling, i.e., to the study of individual aspects, characteristics, properties of the technological process not on a real object, but on its model. A model is understood as such a mentally represented or materially implemented system that, reflecting the object of study, is able to reproduce its functions with varying accuracy and replace it at a certain stage of the study.
Thus, a model is a certain system that preserves the essential properties of the original and allows the study of certain properties of the latter by physical or mathematical methods. . In other words, a model is a display, a description technological object(process or equipment) using some language, designed to achieve a specific goal. To date, a general theory for modeling complex systems has been developed, which indicates the possibility of using various kinds models for describing technical and technological objects.
The model plays an active role in the study of technological processes: with its help, it is possible to determine various characteristics of technological processes, such as energy costs, consumption of raw materials and output of the finished product, quality indicators of this product, the amount of waste, defective products, design parameters of elements with minimal cost and in a short time. equipment. You can outline and test an effective technology management strategy, perform an optimization procedure, etc.
The expediency of TP modeling is determined by two main conditions:
Research on the model is cheaper, easier, safer, faster than on the original object;
A rule is known for recalculating the characteristics and parameters of the model into the corresponding values of the original, because otherwise the simulation loses its meaning.
The goal set during the development of the model determines its type, information content and degree of correspondence to the real object, i.e. when formulating the goal, it is necessary to carefully select those essential properties that fully characterize the object in question, to determine the required degree of conformity of the model to the real object (model accuracy ). In a number of cases, this makes it possible to simplify the model, eliminate insignificant, insignificant relationships between quantities from consideration, and reduce the cost of modeling.
When describing technological processes, full-scale, physical and mathematical modeling is more often used.
Full-scale modeling involves an experimental study of a real technological object and subsequent processing of the results using the theory of similarity, regression analysis, correspondence tables. This makes it possible to obtain qualitative or quantitative dependencies that describe the functioning of an object with varying accuracy. However, empirical dependencies based on the representation of the process in the form of a "black box", although they allow solving particular technological problems, have significant drawbacks:
Empirical dependencies cannot be extended to the entire possible range of changes in the regime parameters - they are valid only under the conditions and restrictions under which the full-scale experiment was carried out;
Such dependencies reflect past experience, therefore, on their basis, it is not always possible to identify and justify ways to improve the efficiency of relevant technologies.
In a number of cases, empirical dependences are of a qualitative nature, i.e., they establish only the nature of the influence of some quantities on others, without establishing quantitative patterns.
Physical modeling also involves experimental studies with subsequent processing of the results. However, such studies are carried out not on a real technological object, but on special laboratory facilities that preserve the nature of phenomena and have a physical similarity. Thus, physical modeling is based on the similarity of processes of the same nature occurring in the original object and in the physical model, and is as follows:
Establish the main parameters of the technological process to be numerically determined, characterizing its quality;
One or more physical models are calculated and made in the form of laboratory or semi-production (experimental, pilot) installations. The calculation of these installations is carried out on the basis of the theory of similarity, which guarantees the possibility of transferring the results to a real object;
As a result of the experiment on the model, numerical values and relationships of the selected parameters are obtained and recalculated for the original.
With physical modeling, it is possible to obtain extensive information about the individual processes that determine the structure of this technology.
Analog simulation is associated with the similarity of processes of different nature and is based on the fact that for various physical phenomena there are the same patterns of their description. Similar objects or processes are considered to be described by equations of the same form. Examples include the Fourier equations (8.2.6) and Fick equations (8.2.9). Despite the difference in the physical quantities included in them, all operators coincide and follow in the same sequence. Therefore, studying one process, we will obtain dependencies that are valid (up to notation) for another. For analog modeling, both experimental methods and analog computers are used.
Analytical modeling provides the most powerful tool for their study and involves obtaining and studying various mathematical models. So, structural models are used for a general or preliminary description of an object and allow you to identify and define its elements, their properties and the relationship between elements and properties of elements. Usually to build structural model use the apparatus of set theory. Classification models allow you to organize the objects under study, identify common features in them and rank them according to these features. Such models are necessary in the construction of control automation systems, the creation of data banks and the development of computer-aided design systems, information retrieval systems, and in a number of other cases. Cognitive models are used to quantitatively describe the patterns of various processes or equipment operation. They establish relationships, relationships between quantities that characterize a process or laboratory equipment.
The cognitive model describes, as a rule, the physical and chemical mechanism of the process and may not contain technological parameters or characteristics of the object.
There are relationships between particular models that describe individual processes or other structural components of the object under study. Accounting for such relationships, i.e. joint decision equations describing individual unit processes leads to the construction of a generalized model of a method or method of processing.
Technological models differ from cognitive models in that the purpose of their construction is to find quantitative relationships between mode parameters, operating conditions - inputs of a technological system and indicators of its technical level, i.e., system outputs. The construction of technological models is always associated with an assessment of the level of quality and an increase in the efficiency of the functioning of technological systems. Typically, technological models are built on the basis of mathematical models individual processes or based on a generalized object model. However, in some cases, a complete analytical description of the object is impossible, and when building technological models, some empirical dependencies are used. As a rule, technological models are built to study certain aspects of the functioning of a technological system, i.e. they are of a private nature.
For most technological processes, due to their complexity, the construction of a single generalized model that adequately describes all aspects and features of their course is difficult or impossible. Therefore, when modeling TP, the principle of decomposition and solving local problems is used, which makes it possible to single out and model individual aspects, properties of TP. As a result of this approach, TP appears to be a set of models that describe individual patterns of its functioning and are designed to solve a certain range of problems. Such a view follows naturally from the systems analysis described above. Hierarchy of technology generates hierarchy of models (models of TP, TO, TM), multidimensionality of technologies - a variety of models (models of physical and chemical processes, technologies, equipment).
Example. As an example of the variety of models, consider the technology of electrochemical dimensional processing (ECM). The models used in the study and description of such technology are shown in Fig. 8.2.35.
The specific cognitive models in this case include the following:
kinematic (description of the kinematics of the mutual movement of the electrodes);
hydraulic (description of fluid movement in a narrow interelectrode channel);
electrical (description of the electric field in the interelectrode gap);
thermal (description of the temperature field);
electrochemical (description of electrode processes and transfer processes in an electrochemical system);
chemical (description of the chemical stages of the total electrode process, chemical transformations of a substance in solution).
Technological models include a shaping model (description of the movement of the anode boundary during electrochemical dissolution of its surface), a model of an electrode-tool, and a number of others.
Rice. 8.2.35. Types of models for describing the processes of electrochemical processing of materials
Modeling is based on the basic ideas of the theory of similarity, according to which phenomena, processes are called similar if the data obtained in the study of one of them can be extended to others. For such phenomena, the constancy of the ratios of some quantities characterizing the process, or combinations of such quantities, called similarity criteria, is necessary [Table. P1,2,3]. So, for example, when studying the flow of liquid media, the Reynolds criterion is widely used:
 ,
,
Where v- fluid flow rate, m/s; d- hydraulic flow diameter, m; ν - kinematic viscosity of the medium, m 2 / s. The Reynolds number is a dimensionless quantity, the value of which determines the nature of fluid movement, the distribution of flow velocities over the channel section, and other flow parameters.
The main (third) similarity theorem states that for the similarity of phenomena it is necessary and sufficient that their uniqueness conditions be similar. This means that geometric similarity, similarity of physical constants, initial and boundary conditions, and the similarity criteria, composed of the quantities included in the uniqueness conditions, would be the same. Consequently, all such phenomena differ from each other only in the scales of characteristic quantities. Thus, if phenomena or processes are similar, then the patterns obtained in the study of some of them can be transferred to others, and the model results can be recalculated taking into account scale factors.
Summarizing what has been said, we can conclude that the main requirement for a model is its compliance with the modeled object. The degree of conformity of the model to the real phenomenon that it describes is called the adequacy of the model. Proof of adequacy is one of the main steps in building any model. To quantify the adequacy, the concept of “model accuracy” is used. Each model must be accompanied by information about its accuracy in order to reliably use the results of the simulation.
The accuracy of deterministic values is determined by the deviation of the simulation result x* from the corresponding real value x, and the accuracy of stochastic models is estimated by probabilistic characteristics.
To ensure the adequacy of the model at the stage of its construction, the following rules are recommended:
choose a rational sequence for building the model;
use an iterative process of building a model, i.e., a multi-stage procedure for its development with an assessment of intermediate results, analysis of their accuracy and correction of the model of the previous stage;
refine models based on available experimental data;
refine models based on getting expert assessments, the results of the operation of the object and other additional data.
The complication of technological processes in the agro-industrial complex, the increase in the number of parameters that are significant in building models, the tightening of the terms of modeling, the limitation of material resources allocated for these purposes - all these factors make it difficult, and in some cases exclude subject modeling. Therefore, the mathematical modeling of TP with the use of modern computer technologies comes to the fore.
Mathematical modeling of TP is a study carried out by solving a system of mathematical relationships describing TP, and having three stages:
drawing up a mathematical description of the process or its element;
selection of a method for solving a system of equations of a mathematical description and its implementation in the form of an algorithm, a program for obtaining quantitative values or ratios;
establishing the adequacy of the model to the original.
When constructing mathematical models, the real process is simplified, schematized, and the resulting scheme, depending on its complexity, is described by one or another mathematical apparatus. In a specific case, the mathematical description is presented as a system of algebraic, differential, integral equations or their combination.
From the point of view of the analysis of the mathematical model, it is advisable to distinguish three of its sides:
the semantic aspect reflects the physical description of the modeled object;
the analytical aspect is a system of equations describing the ongoing processes and the relationship between them;
computational - a solution method and algorithm implemented as a program in one of the programming languages.
Recently, for the study of complex systems, including technological processes, simulation modeling, which is based on a computer experiment, has been increasingly used. To implement the mathematical model, a modeling algorithm is constructed that reproduces the process of the system functioning in time. By changing the input data, information is obtained about the states of the process at given points in time, according to which the characteristics of the object are evaluated. Thus, in simulation modeling, one deals with models that cannot be used to calculate or predict the result in advance.
Example. Let us consider as an example the simulation of the process of electrochemical anode treatment of the material described earlier (Fig. 8.2.15, b). This technology has become widespread in the manufacture of spatially complex products in the energy sector, such as turbine and compressor blades. From a technological point of view, it is necessary to be able to calculate the time t required to remove a metal layer with a thickness of z (machine processing time), or the value of the metal layer (allowance) zп, removed in time t. To obtain the calculated dependences, we use a particular model of a plane-parallel interelectrode gap (IEG), the semantic aspect of which is clear from Fig. 8.2.36, a. As can be seen, the electrode-tool (EI) moves forward at a speed v and, and on the surface of the anode (A) a diagram of local rates of electrochemical dissolution ve is formed, the interelectrode gap is filled with electrolyte, and voltage U is applied between the electrodes.
Let us make some assumptions to simplify the model. Let the rate of electrochemical dissolution be the same for all points of the anode surface and let the properties of the electrolyte be the same for all points of the MEP. Then, to describe the process, you can use the laws of Ohm and Faraday:
where U is the voltage on the electrodes; i - current density; a - current interelectrode gap; χ - specific electrical conductivity of the electrolyte; c is the electrochemical equivalent of the metal; η is the current efficiency of the metal dissolution reaction; ρ is the density of the processed metal.
It follows from the calculation scheme that da/dt = ve - vy, since the dissolution of the surface is compensated by the displacement of the EE towards the workpiece. From here we obtain a differential equation describing the change in the MEP over time:
![]() (8.2.26)
(8.2.26)

under the initial condition t= 0; a = a0.
The analysis of the model is greatly simplified if we take A = const. This assumption is correct for many practically important problems. Let us consider two cases that are implemented in most schemes of electrochemical shaping: vi= 0 (the case of stationary EI) and vii = const (the motion of EI at a constant speed). Integrating the above differential equation, we obtain for the first case:

![]() (8.2.27)
(8.2.27)
and for the second:
By transforming the obtained expressions, it is possible to obtain the dependence of time on the value of the MEP.
Despite the simplified nature of the proposed model, it is successfully used in technological calculations and in many cases describes the experimental data well.
However, in those cases where the ratio of the length of the interelectrode gap to its width  is sufficiently large (in real processes, k reaches values of 200–1000), the properties of the electrolyte along the MEP length change strongly due to the concomitant release of heat and gas, and the above assumptions are unacceptable.
is sufficiently large (in real processes, k reaches values of 200–1000), the properties of the electrolyte along the MEP length change strongly due to the concomitant release of heat and gas, and the above assumptions are unacceptable.
It is necessary to build models that take into account the dependence of process parameters on the coordinates of the hydraulic path and time.
To obtain such dependencies, physical modeling is widely used. On fig. 8.2.36, b shows a physical model of a long-length MEC, which makes it possible to obtain distributions of current density, electrolyte temperature, gas content, effective electrical conductivity of the interelectrode medium, local metal removal rate and other parameters along the MEC length by direct experiment.
Pump 1 pumps the electrolyte through a hydraulic path formed by plane-parallel electrodes 2 and 3 built into dielectric plates 4. The value of the interelectrode gap is determined by the thickness of the replaceable gasket 5 and varies within 0.2-2 mm. Variable parameters of the electrolysis mode are: gap size, electrode voltage, electrolyte inlet pressure, its composition, initial temperature, cathode feed rate to the anode, MEP length, electrode material. Gas evolution and the velocity profile of the electrolyte flow were studied using high-speed filming of the process, a sectional anode was used to obtain the distribution of local current densities along the MEC length, pressure and temperature distributions were recorded by pressure strain gauges and thermocouples, and electrode potentials in various sections of the MEC were measured with special probes. The change in metal removal along the length of the channel was recorded by direct measurements.
The analysis shows the presence of a correspondence between the presented physical model and the original: geometric, hydraulic, electrical similarity, similarity of physical constants, initial and boundary conditions are observed. Therefore, the experimental data obtained made it possible not only to refine the mathematical model, but also to obtain technological results suitable for direct use in production conditions.

Rice. 8.2.36. Scheme for the construction of a mathematical model (a) and installation for physical modeling of the ECM process in a narrow long gap (b)
Thus, the above example shows that different types of models complement and refine each other, giving together reliable data for practical use. To date, it is difficult to find such areas in which there would be no developed apparatus for mathematical modeling of the main processes.
Automation and simulation of the technological process
1 PROCESS AUTOMATION
Automation is a direction in the development of production, characterized by the liberation of a person not only from muscular efforts to perform certain movements, but also from the operational control of the mechanisms that perform these movements. Automation can be partial or complex.
Integrated automation is characterized by the automatic execution of all functions for the implementation of the production process without direct human intervention in the operation of the equipment. The responsibilities of a person include setting up a machine or group of machines, turning it on and controlling it. Automation is the highest form of mechanization, but at the same time it is new form production, not a simple replacement manual labor mechanical.
With the development of automation, industrial robots (IR) are increasingly being used, replacing a person (or helping him) in areas with dangerous, unhealthy, difficult or monotonous working conditions.
An industrial robot is a reprogrammable automatic manipulator for industrial applications. Characteristic features PRs are automatic control; the ability to quickly and relatively easy reprogramming, the ability to perform labor actions.
It is especially important that PR can be used to perform work that cannot be mechanized or automated by traditional means. However, PR is just one of many possible means of automating and simplifying production processes. They create the prerequisites for the transition to a qualitatively new level of automation - the creation of automatic production systems that work with minimal human participation.
One of the main advantages of PR is the ability to quickly change over to perform tasks that differ in the sequence and nature of manipulation actions. Therefore, the use of PR is most effective in conditions of frequent change of production facilities, as well as for the automation of low-skilled manual labor. Equally important is the provision of quick readjustment of automatic lines, as well as their completion and commissioning in a short time.
Industrial robots make it possible to automate not only basic, but also auxiliary operations, which explains the ever-growing interest in them.
The main prerequisites for expanding the use of PR are as follows:
improving the quality of products and the volume of its output with the same number of employees due to the reduction in the time of operations and the provision of a constant “fatigue-free” mode, an increase in the shift ratio of equipment, intensification of existing and stimulation of the creation of new high-speed processes and equipment;
changing the working conditions of workers by freeing them from unskilled, monotonous, heavy and harmful labor, improving safety conditions, reducing the loss of working time from industrial injuries and vocational diseases;
economy of labor power and release of workers for the solution of national economic problems.
1.1 Construction and calculation of the scheme of the model "hard terminal - hole printed circuit board»
An essential factor in the implementation of the assembly process is to ensure the assembly of the electronic module. Collectability depends in most cases on the accuracy of positioning and the effort required to assemble the structural elements of the module, structurally technological parameters mating surfaces.
In the variant when a hard lead is inserted into the board hole, the following can be distinguished: characteristic species contact of mating elements:
non-contact output passage through the hole;
contact of the zero type, when the end of the output touches the generatrix of the chamfer of the hole;
contact of the first type, when the end of the output touches the side surface of the hole;
contact of the second kind, when the side surface of the output touches the edge of the chamfer of the hole;
contact of the third type, when the end of the output touches the side surface of the hole, and the output surface touches the edge of the chamfer of the hole.
The following are accepted as classification signs for distinguishing types of contacts: a change in the normal reaction at the point of contact; friction force; the shape of the elastic line of the rod.
The tolerances of individual elements have a significant influence on the reliable operation of the setting head. In the positioning and movement processes, a chain of tolerances occurs, which in unfavorable cases can lead to an error in the installation of the ERE, leading to a poor assembly.
The assembly of the product depends, therefore, on three factors:
dimensional and accuracy parameters of the mating surfaces of the product components;
dimensional and accuracy parameters of the mating surfaces of the base element of the product;
dimensional and precision positioning parameters of the executive body with the component located in it.
Consider the case of a zero-type contact, the diagram of which is shown in Figure 1.1.



M G

R G
N
R F l

![]() Q
Q
![]()
Figure 1.1 - Calculation scheme of the contact of the zero type.
Initial data:
Similar works:
Process automation
Coursework >> Industry, productionEconomics processes. processes includes two stages: 1) process; 2) economic justification. To implement...
The technological process of creating the part "Die"
Practice Report >> Industry, productionMechanization and operations processes do not apply. 2.4 Equipment used in process manufacturing parts... development for the future; - or economic and mathematical methods, ...
Automation of end-to-end business processes of enterprises using BPEL
Article >> Computer science, programmingThe whole BPM industry is Business Process Modeling. ... While the prerequisites have identified a specific historical... since opportunities such as partnerships, the implementation of composite...
-
Automation and Simulation technological process
1 PROCESS AUTOMATION
Automation is a direction in the development of production, characterized by the liberation of a person not only from muscular efforts to perform certain movements, but also from the operational control of the mechanisms that perform these movements. Automation can be partial or complex.
Integrated automation is characterized by the automatic execution of all functions for the implementation of the production process without direct human intervention in the operation of the equipment. The responsibilities of a person include setting up a machine or group of machines, turning it on and controlling it. Automation is the highest form of mechanization, but at the same time it is a new form of production, and not a simple replacement of manual labor with mechanical labor.
With the development of automation, industrial robots (IR) are increasingly being used, replacing a person (or helping him) in areas with dangerous, unhealthy, difficult or monotonous working conditions.
An industrial robot is a reprogrammable automatic manipulator for industrial applications. The characteristic features of PR are automatic control; the ability to quickly and relatively easy reprogramming, the ability to perform labor actions.
It is especially important that PR can be used to perform work that cannot be mechanized or automated by traditional means. However, PR is just one of many possible means of automating and simplifying production processes. They create the prerequisites for the transition to a qualitatively new level of automation - the creation of automatic production systems working with minimal human intervention.
One of the main advantages of PR is the ability to quickly change over to perform tasks that differ in the sequence and nature of manipulation actions. Therefore, the use of PR is most effective in conditions of frequent change of production facilities, as well as for the automation of low-skilled manual labor. Equally important is the provision of quick changeovers. automatic lines, as well as their assembly and launch in a short time.
Industrial robots make it possible to automate not only basic, but also auxiliary operations, which explains the ever-growing interest in them.
The main prerequisites for expanding the use of PR are as follows:
improving the quality of products and the volume of its output with the same number of employees due to the reduction in the time of operations and the provision of a constant “fatigue-free” mode, an increase in the shift ratio of equipment, intensification of existing and stimulation of the creation of new high-speed processes and equipment;
changing the working conditions of employees by freeing them from unskilled, monotonous, hard and hazardous work, improving safety conditions, reducing losses of working time from industrial injuries and vocational diseases;
economy of labor power and release of workers for the solution of national economic problems.
1.1 Construction and calculation of the scheme of the model "hard terminal - PCB hole"
An essential factor in the implementation of the assembly process is to ensure the assembly of the electronic module. Assemblability depends in most cases on the positioning accuracy and effort required to assemble the module structural elements, the design and technological parameters of the mating surfaces.
In the variant when a hard lead is inserted into the board hole, the following characteristic types of contact of the mating elements can be distinguished:
non-contact output passage through the hole;
contact of the zero type, when the end of the output touches the generatrix of the chamfer of the hole;
contact of the first type, when the end of the output touches the side surface of the hole;
contact of the second kind, when the side surface of the output touches the edge of the chamfer of the hole;
contact of the third type, when the end of the output touches the side surface of the hole, and the output surface touches the edge of the chamfer of the hole.
The following are accepted as classification signs for distinguishing types of contacts: a change in the normal reaction at the point of contact; friction force; the shape of the elastic line of the rod.
The tolerances of individual elements have a significant influence on the reliable operation of the setting head. In the positioning and movement processes, a chain of tolerances occurs, which in unfavorable cases can lead to an error in the installation of the ERE, leading to a poor assembly.
The assembly of the product depends, therefore, on three factors:
dimensional and accuracy parameters of the mating surfaces of the product components;
dimensional and accuracy parameters of the mating surfaces of the base element of the product;
dimensional and precision positioning parameters of the executive body with the component located in it.
Consider the case of a zero-type contact, the diagram of which is shown in Figure 1.1.


 Q
Q



 j
jFigure 1.1 - Calculation scheme of the contact of the zero type.
Initial data:
F is the assembly force directed along the head;
f is the coefficient of friction;
Rg is the reaction of the assembly head, perpendicular to its course;
N is the reaction normal to the chamfer forming;
Mg - bending moment relative to the assembly head;





Not only decrease, for example, by improving the culture of production and the use of environmentally more advanced equipment and technologies, but also increase, for example, with the introduction of new technological processes, such as flue gas desulfurization and denitrification. waste water- this is water, the properties of which have been changed as a result of domestic, industrial, agricultural or ...





To complex shaping equipment and tools. Another important task of the Chamber of Commerce and Industry is the management of the processes of the Chamber of Commerce. Automation of CCI process management allows for efficient complete solution all pre-production tasks. Work on the technological preparation of production is carried out by the relevant divisions and services of the enterprise. As a rule, the largest amount of work and the total...





At one or more workplaces, lengthening production lines, the use of mechanized group and standard processes. The proportionality of production processes must be restored all the time with their consistent improvement, associated with an increase in the level of mechanization and automation. At the same time, an increase in proportionality should be achieved on the basis of an ever higher ...





BIOREACTOR Sheet 90 Report. Dear members of the State Examination Commission, let me present to your attention a thesis project on the topic: "Automated control system for the sterilization process of a bioreactor" The sterilization process of a bioreactor (or fermenter) is an important stage in the process of biosynthesis of the antibiotic erythromycin. The essence of the sterilization process is...
Automation and simulation of the technological process
be economical;
have a small mass;
provide easy load matching.
According to the type of power energy used, drives are distinguished: electric, pneumatic, hydraulic, mechanical, electromechanical, combined.
Pneumatic drives use the energy of compressed air with a pressure of about 0.4 MPa, obtained from the workshop pneumatic network, through an air preparation device.
1.2.1 Terms of reference for the design of the device
On the stage terms of reference the optimal structural and layout solution is determined and compiled technical requirements to equipment:
name and scope - a device for installing ERE on a printed circuit board;
the basis for the development is the task for the CCP;
the purpose and purpose of the equipment is to increase the level of mechanization and automation technological operation;
sources of development - the use of experience in the implementation of technological equipment in the industry;
technical requirements:
the number of steps of mobility is at least 5;
maximum carrying capacity, N 2.2;
static force at the working point of the equipment, N, not more than 50;
time to failure, h, not less than 100;
absolute positioning error, mm +0.1;
speed of movement with maximum load, m/s: - on a free trajectory no more than 1; - on a rectilinear trajectory no more than 0.5;
Calibration of the position of the manipulator links.
At the lower control level, the tasks of processing the given movements by the manipulator links, which are formed at the upper level, are solved. Program positions are worked out with the given parameters (speed, acceleration) using digital electromechanical modules that set the manipulator links in motion. The control system consists of the following devices: a central processing unit (MCP) module; RAM; ROM; analog input module (MAV), where signals from potentiometric sensors of coarse computational position are fed; serial interface module (SIM); input-output module (MVV); communication module (MS).
The exchange of information between top-level modules is carried out using the system backbone.
The lower control level has:
Drive Processor Modules (MPP);
Drive control modules (CMU).
The number of MPP and MUP modules corresponds to the number of manipulator links and is equal to 6. The MPP is connected to the communication module using system highways. The control of the electric motors of the manipulator links is carried out using transistor pulse-width converters (PWM), which are part of the power supply unit (PSU). The MCP is based on the K1801 microprocessor and has:
Single chip processor;
Initial run register;
System RAM, with a capacity of 3216 - bit words; system ROM, with a capacity of 2x16 - bit words;
Resident ROM, with a capacity of 4x16 - bit words;
Programmable timer.
The speed of the MCP is characterized by the following data:
Summation with register addressing means - 2.0 µs;
Summation with a mediocre-register addressing means - 5.0 μs;
Fixed point multiplication - 65 µs.
The operator panel is designed to perform the operations of switching on and off the PR, to select its operating modes.
The main elements of the panel are:
AC power switch (NETWORK);
emergency stop button (.emergency). The mains power turns off when the button is pressed. The return of the button to its initial position is carried out by turning it clockwise;
control system power button (CK1);
control system power off button (CK0);
Drive power up button (DRIVE 1). Button push
the drive power is turned on, at the same time the electromagnetic brakes of the motors are unlocked;Drive power off button (DRIVE 0);
Mode selection switch. It has three positions ROBOT, STOP, RESTART. In ROBOT mode, the system works normally. In STOP mode, program execution will stop at the end of the flow step.
Switching the switch to ROBOT mode will cause the program to continue running to the beginning of the next step. The RESTART mode is used to restart the execution of the user program from its first step;
Automatic start button (AUTO START). Pressing the button causes the system to start so that the robot starts executing the program without the task of commands from the keyboard. Pressing the button is performed after turning on the power of the SC. The mode is activated after DRIVE 1 is switched on.
The hand control is used to position the manipulator during teaching and programming. The remote control provides 5 modes of operation:
control of the manipulator from a computer (COMP);
manual control in the main coordinate system (WORLD);
manual control over degrees of freedom (JOINT);
manual control in the tool coordinate system (TOOL );
Disabling drives of mobility measures (FREE).
The selected mode is identified by a signal light.
The speed of movement of the manipulator is regulated using the buttons "SPEED", "+", "-". The buttons "CLOSE" and "OPEN" are used to compress and decompress the gripping device of the manipulator.
Button " S TER" is used to record the coordinates of points when setting the trajectory of movement. The "STOP" button, located on the end of the hand control panel, is designed to interrupt the execution of the program with the power of the drives turned off. It is used to stop movement in a normal situation. The "OFF" button has a similar purpose , as well as “STOP.” The difference lies in the fact that the power supply of the manipulator drives is not turned off.
Moving the joints of the manipulator with the help of the manual control panel is carried out in three modes: JOINT , WORLD and TOOL .
In mode JOINT (selected by the corresponding button on the control panel), the user can directly control the movement of individual links of the manipulator. This movement corresponds to a pair of buttons "-" and "+" respectively for each link of the manipulator (ie column, shoulder, elbow, and three gripping movements).
In mode WORLD actually fixes relative to the main coordinate system and moves in certain directions of this system (respectively X, Y , Z ).
It should be noted that work in the WORLD mode can be carried out at low speeds in order to avoid getting into the boundary of the robot's arm space. We also point out that the movement is provided automatically with the help of all links of the manipulator simultaneously.
LLP mode L provides movement in the active coordinate system.
A 12-bit line indicator is designed to display information about operating modes and errors:
-N OKIA AOH - short-term is displayed at startup;
-ARM PWR OFF - the manipulator drives are powered off;
-MANUAL MODE - allowed to control the robot from the control panel;
SOMP MO D E - the manipulator is guided by a computer;
-L IMIT S TOR - the joint is moved to the extreme position;
LLP CLOSE - the specified point is very close to the manipulator;
LLP FAR - given point is outside working area robot;
TEACH MOOE - the TEACH mode is activated, the manipulator follows arbitrary trajectories;
-S TEACH MODE E - TEACH-S mode is activated, the manipulator moves after straight-line trajectories;
-ERROR - the buttons on the hand control are pressed at the same time, which constitute an illegal operation, etc..
3 Technology and automation of the production of REA: Textbook for universities / Ed. A.P. Dostanko.-M.: Radio and communication, 2009.
4 Computer production technology - Dostanko A.P. and others: Textbook-Mn.: Higher School, 2004.
5 Technological equipment for the production of electronic billing aids: Navch. Posibnik / M.S. Makurin.-Kharkiv: HTURE, 1996.
Send your good work in the knowledge base is simple. Use the form below
Students, graduate students, young scientists who use the knowledge base in their studies and work will be very grateful to you.
Automation and simulation of the technological process
1 PROCESS AUTOMATION
Automation is a direction in the development of production, characterized by the liberation of a person not only from muscular efforts to perform certain movements, but also from the operational control of the mechanisms that perform these movements. Automation can be partial or complex.
Integrated automation is characterized by the automatic execution of all functions for the implementation of the production process without direct human intervention in the operation of the equipment. The responsibilities of a person include setting up a machine or group of machines, turning it on and controlling it. Automation is the highest form of mechanization, but at the same time it is a new form of production, and not a simple replacement of manual labor with mechanical labor.
With the development of automation, industrial robots (IR) are increasingly being used, replacing a person (or helping him) in areas with dangerous, unhealthy, difficult or monotonous working conditions.
An industrial robot is a reprogrammable automatic manipulator for industrial applications. The characteristic features of PR are automatic control; the ability to quickly and relatively easy reprogramming, the ability to perform labor actions.
It is especially important that PR can be used to perform work that cannot be mechanized or automated by traditional means. However, PR is just one of many possible means of automating and simplifying production processes. They create the prerequisites for the transition to a qualitatively new level of automation - the creation of automatic production systems that work with minimal human participation.
One of the main advantages of PR is the ability to quickly change over to perform tasks that differ in the sequence and nature of manipulation actions. Therefore, the use of PR is most effective in conditions of frequent change of production facilities, as well as for the automation of low-skilled manual labor. Equally important is the provision of quick readjustment of automatic lines, as well as their completion and commissioning in a short time.
Industrial robots make it possible to automate not only basic, but also auxiliary operations, which explains the ever-growing interest in them.
The main prerequisites for expanding the use of PR are as follows:
improving the quality of products and the volume of its output with the same number of employees due to the reduction in the time of operations and the provision of a constant “fatigue-free” mode, an increase in the shift ratio of equipment, intensification of existing and stimulation of the creation of new high-speed processes and equipment;
changing the working conditions of employees by freeing them from unskilled, monotonous, hard and hazardous work, improving safety conditions, reducing losses of working time from industrial injuries and vocational diseases;
economy of labor power and release of workers for the solution of national economic problems.
1.1 Construction and calculation of the scheme of the model "hard terminal - PCB hole"
An essential factor in the implementation of the assembly process is to ensure the assembly of the electronic module. Assemblability depends in most cases on the positioning accuracy and effort required to assemble the module structural elements, the design and technological parameters of the mating surfaces.
In the variant when a hard lead is inserted into the board hole, the following characteristic types of contact of the mating elements can be distinguished:
non-contact output passage through the hole;
contact of the zero type, when the end of the output touches the generatrix of the chamfer of the hole;
contact of the first type, when the end of the output touches the side surface of the hole;
contact of the second kind, when the side surface of the output touches the edge of the chamfer of the hole;
contact of the third type, when the end of the output touches the side surface of the hole, and the output surface touches the edge of the chamfer of the hole.
The following are accepted as classification signs for distinguishing types of contacts: a change in the normal reaction at the point of contact; friction force; the shape of the elastic line of the rod.
The tolerances of individual elements have a significant influence on the reliable operation of the setting head. In the positioning and movement processes, a chain of tolerances occurs, which in unfavorable cases can lead to an error in the installation of the ERE, leading to a poor assembly.
The assembly of the product depends, therefore, on three factors:
dimensional and accuracy parameters of the mating surfaces of the product components;
dimensional and accuracy parameters of the mating surfaces of the base element of the product;
dimensional and precision positioning parameters of the executive body with the component located in it.
Consider the case of a zero-type contact, the diagram of which is shown in Figure 1.1.
MG
RG
R F l
Q
Figure 1.1 - Calculation scheme of the contact of the zero type.
Initial data:
F - assembly force directed along the head;
F = 23 N;
f is the coefficient of friction;
f = 0.12;
l = 8 mm;
= 45;
Q=30.
Rg - reaction of the assembly head, perpendicular to its course;
N - normal to the chamfer-generating reaction;
.
Mg - bending moment relative to the assembly head;
1.2 Construction of the gripper
Grip devices (ZU) industrial robots serve to capture and hold objects of manipulation in a certain position. When designing grippers, the shape and properties of the captured object, the conditions for the flow of the technological process and the features of the technological equipment used are taken into account, which is the reason for the variety of existing gripping bodies of the PR. most important criteria when evaluating the choice of gripping organs are adaptability to the shape of the gripped object, gripping accuracy and gripping force.
In the classification of the gripping devices of the storage device, the signs characterizing the object of capture, the process of capturing and holding the object, the serviced technological process, as well as the signs reflecting the structural and functional characteristics and the constructive base of the storage device are selected as classification features.
The factors associated with the capture object include the shape of the object, its mass, mechanical properties, size ratio, physical and mechanical properties of the object's materials, as well as the state of the surface. The mass of the object determines the required gripping force, i.e. carrying capacity PR, and allows you to choose the type of drive and the design base of the memory; the state of the surface of the object predetermines the material of the jaws that the memory should be equipped with; the shape of the object and the ratio of its dimensions also affect the choice of memory design.
The properties of the material of the object affect the choice of the method of capturing the object, the required degree of sensing of the memory, the possibility of reorienting objects in the process of capturing and transporting them to the technological position. In particular, for an object with a high degree of surface roughness, but non-rigid mechanical properties, it is possible to use only a “soft” clamping element equipped with sensors for determining the clamping force.
The variety of memory devices suitable for solving similar problems, and a large number of features that characterize their various design and technological features, do not allow one to build a classification according to a purely hierarchical principle. There are memory devices according to the principle of action: grasping, supporting, holding, capable of relocating an object, centering, basing, fixing.
According to the type of control, the memory is divided into: unmanaged, command, hard-coded, adaptive.
According to the nature of attachment to the arm of the PR, all memory devices are divided into: non-replaceable, replaceable, quick-change, suitable for automatic change.
All grippers are driven by a special device - a drive.
A drive is a system (electrical, electromechanical, electropneumatic, etc.) designed to set in motion the actuators of automated technological and production machines.
The main functions of the drive: effort (power, torque), speed (set of speeds, speed range); the ability to maintain a given speed (force, torque) under load changes; speed, design complexity; efficiency, cost, dimensions, weight.
Basic requirements for drives. The drive must:
1) comply with the given TOR in all main characteristics;
2) enable electrical remote automatic control;
3) be economical;
4) have a small mass;
5) provide simple coordination with the load.
According to the type of power energy used, drives are distinguished: electric, pneumatic, hydraulic, mechanical, electromechanical, combined.
Pneumatic actuators use energy compressed air with a pressure of about 0.4 MPa, obtained from the workshop pneumatic network, through an air preparation device.
1.2.1 Terms of reference for the design of the device
At the stage of technical specifications, the optimal structural and layout solution is determined and technical requirements for equipment are drawn up:
1) name and scope - a device for installing ERE on a printed circuit board;
2) the basis for the development - the task for the CCP;
3) the purpose and purpose of the equipment is to increase the level of mechanization and automation of the technological operation;
4) sources of development - the use of experience in the implementation of technological equipment in the industry;
5) technical requirements:
a) the number of mobility steps is at least 5;
b) maximum load capacity, N 2.2;
c) static force at the working point of the equipment, N not more than 50;
d) time between failures, h, not less than 100;
e) absolute positioning error, mm +0.1;
f) speed of movement with maximum load, m/s: - on a free trajectory no more than 1; - on a rectilinear trajectory no more than 0.5;
g) working space without equipment spherical with a radius of 0.92;
h) gripping device drive pneumatic;
6) safety requirements GOST 12.1.017-88;
7) payback period 1 year.
1.2.2 Description of the design and principle of operation of the industrial robot RM-01
The industrial robot (PR) RM-01 is used to perform various operations of folding, mounting, sorting, packaging, loading and unloading, arc welding, etc. General form the robot is shown in Figure 1.2.
Figure 1.2 - Industrial robot RM-01
The robot arm has six levels of mobility. The links of the manipulator are connected one to one with the help of joints that imitate the elbow or shoulder joint of a person. Each link of the manipulator is driven by an individual DC motor through a gearbox.
Electric motors are equipped with electromagnetic brakes, which allows you to reliably brake the manipulator links when the power is turned off. This ensures the safety of the robot maintenance, as well as the ability to move its links in manual mode. PR RM-01 has a position-contour control system, which is implemented by the microprocessor control system "SPHERE-36", built according to the hierarchical principle.
"SPHERE-36" has two levels of control: upper and lower. At the top level, the following tasks are solved:
Calculation of algorithms for planning the trajectory of the movement of the capture of the manipulator and the preparation of programs for the movement of each of its links;
Logical processing of information about the state of the device that makes up the robotic complex, and the agreement of work as part of the RTK;
Exchange of information with computers of a higher level;
Interactive mode of the operator using the video terminal and keyboard;
Read-write, long-term preservation of programs using floppy disk;
Manual control mode of the manipulator using the manual control panel;
Diagnostics of the control system;
Calibration of the position of the manipulator links.
At the lower control level, the tasks of processing the given movements by the manipulator links, which are formed at the upper level, are solved. Program positions are worked out with the given parameters (speed, acceleration) using digital electromechanical modules that set the manipulator links in motion. The control system consists of the following devices: a central processing unit (MCP) module; RAM; ROM; analog input module (MAV), where signals from potentiometric sensors of coarse computational position are fed; serial interface module (SIM); input-output module (MVV); communication module (MS).
The exchange of information between top-level modules is carried out using the system backbone.
The lower control level has:
Drive Processor Modules (MPP);
Drive control modules (CMU).
The number of MPP and MUP modules corresponds to the number of manipulator links and is equal to 6. The MPP is connected to the communication module using system highways. The control of the electric motors of the manipulator links is carried out using transistor pulse-width converters (PWM), which are part of the power supply unit (PSU). The MCP is based on the K1801 microprocessor and has:
Single chip processor;
Initial run register;
System RAM, with a capacity of 3216 - bit words; system ROM, with a capacity of 2x16 - bit words;
Resident ROM with a capacity of 4x16 - bit words;
Programmable timer.
The speed of the MCP is characterized by the following data:
Summation with register addressing means - 2.0 μs;
Summation with a mediocre-register addressing means - 5.0 μs;
Fixed point multiplication - 65 µs.
The operator panel is designed to perform the operations of switching on and off the PR, to select its operating modes.
The main elements of the panel are:
AC power switch (NETWORK);
emergency stop button (.emergency). The mains power turns off when the button is pressed. The return of the button to its initial position is carried out by turning it clockwise;
control system power button (CK1);
control system power off button (CK0);
Drive power up button (DRIVE 1). Button push
the drive power is turned on, at the same time the electromagnetic brakes of the motors are unlocked;Drive power off button (DRIVE 0);
Mode selection switch. It has three positions ROBOT, STOP, RESTART. In ROBOT mode, the system works normally. In STOP mode, program execution will stop at the end of the flow step.
Switching the switch to ROBOT mode will cause the program to continue running to the beginning of the next step. The RESTART mode is used to restart the execution of the user program from its first step;
Automatic start button (AUTO START). Pressing the button causes the system to start so that the robot starts executing the program without the task of commands from the keyboard. Pressing the button is performed after turning on the power of the SC. The mode is activated after DRIVE 1 is switched on.
The hand control is used to position the manipulator during teaching and programming. The remote control provides 5 modes of operation:
control of the manipulator from a computer (COMP);
manual control in the main coordinate system (WORLD);
manual control over degrees of freedom (JOINT);
manual control in the tool coordinate system (TOOL);
Disabling drives of measures of mobility (FREE).
The selected mode is identified by a signal light.
The speed of movement of the manipulator is regulated using the buttons "SPEED", "+", "-". The buttons "CLOSE" and "OPEN" are used to compress and decompress the gripping device of the manipulator.
The "STER" button is used to record the coordinates of points when setting the trajectory of movement. The "STOP" button, located on the end of the hand control panel, is designed to interrupt the execution of the program by turning off the power to the drives. Used to stop movement in a normal situation. The "OFF" button has the same function as the "STOP" button. The difference lies in the fact that the manipulator drives are not powered off.
Moving the joints of the manipulator with the help of the manual control panel is carried out in three modes: JOINT, WORLD and TOOL.
In the JOINT mode (selected by the corresponding button on the control panel), the user can directly control the movement of individual links of the manipulator. This movement corresponds to a pair of buttons "-" and "+" respectively for each link of the manipulator (ie column, shoulder, elbow, and three gripping movements).
In the WORLD mode, in fact, fixation is carried out relative to the main coordinate system and movement in certain directions of this system (respectively, X, Y, Z).
It should be noted that work in the WORLD mode can be carried out at low speeds in order to avoid getting into the boundary of the robot's arm space. We also point out that the movement is provided automatically with the help of all links of the manipulator simultaneously.
TOOL mode provides movement in the active coordinate system.
A 12-bit line indicator is designed to display information about operating modes and errors:
NOKIA AOX - short-term is displayed at startup;
ARM PWR OFF - the manipulator drives are powered off;
MANUAL MODE - allowed to control the robot from the control panel;
COMP MODE - the manipulator is guided by a computer;
LIMIT STOR - the joint is moved to the extreme position;
LLP CLOSE - the given point is very close to the manipulator;
LLP FAR - the given point is outside the working area of the robot;
TEACH MOOE - the TEACH mode is activated, the manipulator follows arbitrary trajectories;
STEACH MODE - the STEACH-S mode is activated, the manipulator moves after straight-line trajectories;
ERROR - the buttons on the hand control are pressed at the same time, which constitute an illegal operation, etc..
In addition, the indicator of the selected speed with this encoding:
1 highlighted element - tool speed? 1.9 mm/s;
2 highlighted element - tool speed? 3.8 mm/s;
3 highlighted element - tool speed? 7.5 mm/s;
4 highlighted element - tool speed? 15.0 mm/s;
5 highlighted element - tool speed? 30 mm/s;
6 highlighted element - tool speed? 60 mm/s;
7 highlighted element - tool speed? 120 mm/s;
8 highlighted element - tool speed? 240 mm/s.
Below is an example of the control program PR RM-01 for drilling holes for surface mounting ERE:
G04 File: SVETOR~1.BOT, Thu Dec 01 21:35:19 2006*
G04 Source: P-CAD 2000 PCB, Version 15.10.17, (C:\DOCUME~1\Shepherd\WORKERS~1\SVETOR~1.PCB)*
G04 Format: Gerber Format (RS-274-D), ASCII*
G04 Format Options: Absolute Positioning*
G04 Leading-Zero Suppression*
G04 Scale Factor 1:1*
G04 NO Circular Interpolation*
G04 Millimeter Units*
G04 Numeric Format: 4.4 (XXXX.XXXX)*
G04 G54 NOT Used for Aperture Change*
G04 File Options: Offset = (0.000mm,0.000mm)*
G04 Drill Symbol Size = 2.032mm*
G04 Pad/Via Holes*
G04 File Contents: Pads*
G04 No Designators*
G04 No Drill Symbols*
G04 Aperture Descriptions*
G04 D010 EL X0.254mm Y0.254mm H0.000mm 0.0deg (0.000mm,0.000mm) DR*
G04 "Ellipse X10.0mil Y10.0mil H0.0mil 0.0deg (0.0mil,0.0mil) Draw"*
G04 D011 EL X0.050mm Y0.050mm H0.000mm 0.0deg (0.000mm,0.000mm) DR*
G04 "Ellipse X2.0mil Y2.0mil H0.0mil 0.0deg (0.0mil,0.0mil) Draw"*
G04 D012 EL X0.100mm Y0.100mm H0.000mm 0.0deg (0.000mm,0.000mm) DR*
G04 "Ellipse X3.9mil Y3.9mil H0.0mil 0.0deg (0.0mil,0.0mil) Draw"*
G04 D013 EL X1.524mm Y1.524mm H0.000mm 0.0deg (0.000mm,0.000mm) FL*
G04 "Ellipse X60.0mil Y60.0mil H0.0mil 0.0deg (0.0mil,0.0mil) Flash"*
G04 D014 EL X1.905mm Y1.905mm H0.000mm 0.0deg (0.000mm,0.000mm) FL*
G04 "Ellipse X75.0mil Y75.0mil H0.0mil 0.0deg (0.0mil,0.0mil) Flash"*
G04 D015 SQ X1.524mm Y1.524mm H0.000mm 0.0deg (0.000mm,0.000mm) FL*
G04 "Rectangle X60.0mil Y60.0mil H0.0mil 0.0deg (0.0mil,0.0mil) Flash"*
G04 D016 SQ X1.905mm Y1.905mm H0.000mm 0.0deg (0.000mm,0.000mm) FL*
G04 "Rectangle X75.0mil Y75.0mil H0.0mil 0.0deg (0.0mil,0.0mil) Flash"*
After drilling holes in the PCB, the robot installs the ERE. After installing the ERE, the board is sent for soldering with a wave of solder.
2 PROCESS SIMULATION
Modeling is a method of studying complex systems, based on the fact that the system under consideration is replaced by a model and the model is studied in order to obtain information about the system under study. A model of the system under study is understood as some other system that behaves, from the point of view of the objectives of the study, similar to the behavior of the system. Usually, a model is simpler and more accessible for research than a system, which makes it easier to study it. Among the various types of modeling used to study complex systems, a large role is given to simulation modeling.
Simulation modeling is a powerful engineering method for studying complex systems, used in cases where other methods are ineffective. The simulation model is a system that displays the structure and functioning of the original object in the form of an algorithm that connects input and output variables taken as characteristics of the object under study. Simulation models are implemented programmatically using various languages. One of the most common languages specifically designed for building simulation models is GPSS.
The GPSS (General Purpose System Simulator) system is intended for writing simulation models of systems with discrete events. The most convenient descriptions in the GPSS system are models of queuing systems, which are characterized by relatively simple rules functioning of their constituent elements.
In the GPSS system, the system being modeled is represented by a set of abstract elements called objects. Each object belongs to one of the object types.
An object of each type is characterized by a certain behavior and a set of attributes defined by the object type. For example, if we consider the work of a port, loading and unloading arriving ships, and the work of a cashier in a cinema, issuing tickets to visitors, one can notice a great similarity in their functioning. In both cases, there are objects that are constantly present in the system (port and cashier), which process the objects entering the system (ships and cinema visitors). In queuing theory, these objects are called devices and customers. When the processing of an incoming object ends, it leaves the system. If at the time of receipt of the request the service device is busy, then the application enters the queue, where it waits until the device is free. You can also think of a queue as an object whose function is to store other objects.
Each object can be characterized by a number of attributes that reflect its properties. For example, a service device has a certain performance expressed by the number of applications processed by it per unit of time. The ticket itself can have attributes that take into account the time it spent in the system, the time it spent waiting in the queue, and so on. A characteristic attribute of the queue is its current length, by observing which during the operation of the system (or its simulation model), you can determine its average length during the operation (or simulation). The GPSS language defines object classes that can be used to define service devices, customer flows, queues, etc., as well as to set specific attribute values for them.
Dynamic objects, called transactions in GPSS, are used to define service requests. Transactions can be generated during simulation and destroyed (leave the system). Generation and destruction of transactions is performed by special objects (blocks) GENERATE and TERMINATE.
Messages (transactions) are dynamic objects GPS/PC. They are created at certain points in the model, promoted by the interpreter through the blocks, and then destroyed. Messages are analogous to units of threads in a real system. Messages can represent different elements even in the same system.
Messages move from block to block in the same way as the elements they represent (programs in the computer example) move.
Each promotion is considered an event that must occur at a specific point in time. The GPSS/PC interpreter automatically determines when events occur. In cases where the event cannot occur, although the moment of its occurrence has approached (for example, when trying to seize the device when it is already busy), the message stops progressing until the blocking condition is removed.
Once the system is described in terms of the operations it performs, it must be described in GPSS/PC language using blocks that perform the corresponding operations in the model.
The user can define specific points in the model at which to collect queue statistics. Then the GPSS/PC interpreter will automatically collect statistics about the queues (queue length, average time spent in a queue, etc.). The number of delayed messages and the duration of these delays is determined only at these given points. The interpreter also automatically counts at these points the total number of messages entering the queue. This is done in much the same way as for devices and memories. In certain counters, the number of messages delayed in each queue is counted, since the number of messages that passed any point in the model without delay may be of interest. The interpreter calculates the average time a message spends in the queue (for each queue) as well as the maximum number of messages in the queue.
2.1 Development of a block diagram and modeling algorithm
To model queuing systems, a general purpose modeling system, GPSS, is used. This is necessary due to the fact that in the practice of research and design of complex systems, there are often systems that need to process a large flow of applications passing through service devices.
Models on GPSS consist of a small number of operators, due to which they become compact and, accordingly, widespread. This is because GPSS has built in as many logic programs as needed for simulation systems. It also includes special means to describe the dynamic behavior of systems that change in time, and the change in states occurs at discrete times. GPSS is very convenient for programming because the GPSS interpreter performs many functions automatically. Many other useful elements are included in the language. For example, GPSS maintains the simulation timer, schedules events to occur later in the simulation time, causes them to occur on time, and manages the order in which they arrive.
To develop a block diagram, we will analyze the technological process of assembling the module being developed.
This technological process is characterized by sequential execution of technological operations. Therefore, the block diagram will look like a chain of series-connected blocks, each of which corresponds to its own technological operation and each of which lasts a certain time. The connecting links of these blocks are the queues formed as a result of the execution of each technological operation, and are explained by the different execution time of each of them. This block diagram is compiled on the basis of the design scheme for the assembly process of the designed module (Fig. 1.2) and is shown in Fig. 2.1.
Figure 2.1 - Block diagram of the technological process
In accordance with this scheme, we will compose an algorithm for the model.
This algorithm contains the following blocks:
Creates transactions at certain intervals;
Occupation of the queue by a transaction;
Release of the queue;
Occupation of the device;
Release of the device;
Transaction processing delay.
All blocks are written from the first position of the line, first comes the name of the block, and then, separated by commas, the parameters. There must be no spaces in the parameter entry. If some parameter is absent in the block (set by default), then the corresponding comma remains (if this is not the last parameter). If the character * is in the first position of the line, then this line is with a comment.
Let's describe the parameters of some blocks:
A). GENERATE A,B,C,D,E,F
Creates transactions at specified intervals.
A is the average time interval between the occurrences of transactions.
B - 1) if a number, then this is half of the field in which the value of the interval between the appearances of transactions is evenly distributed;
2) if a function, then to determine the interval, the value of A is multiplied by the value of the function.
C - the time of the appearance of the first transaction.
D is the maximum number of transactions.
E - the value of the transaction priority.
F - the number of parameters of the transaction and their type (PB-byte integer, PH-half-word integer, PF-full-word integer, PL-floating point).
b). TERMINATE A
Destroys transactions from the model and decrements the completion counter by A units. The model will terminate if the completion count becomes less than or equal to zero. If parameter A is absent, then the block simply destroys the transactions.
If the device with the name A is free, then the transaction occupies it (puts it in the "busy" state), if not, then it is queued to it. The instrument name can be a numeric number or a sequence of 3 to 5 characters.
The transaction releases the device named A, i.e. puts it in the "free" state.
e). ADVANCE A,B
Delays the processing of a transaction by this process and schedules the start time of the next stage of processing.
A - average delay time.
B - has the same meaning as for GENERATE.
Collects statistics about the entry of the transaction into the queue named A.
Collects statistics about the exit of the transaction from the queue with the name A.
2 .2 Development of a program for modeling the technological process using the GPSS language.
Now the task of modeling is to create a computer model that will allow us to study the behavior of the system during the simulation time. In other words, it is necessary to implement the constructed block diagram on a computer using blocks and operators of the GPSS language.
Since the operation of the model is associated with the successive occurrence of events, it is quite natural to use the concept of "Model Time Timer" as one of the elements of the system model. To do this, a special variable is introduced and used to fix the current time the model is running.
When the simulation starts, the simulation timer is usually set to zero. The developer himself decides what value of real time to take as a reference point. For example, the beginning of the countdown may correspond to 8 am on the first simulated day. The developer must also decide on the choice of the value of the unit of time. The time unit can be 1 s, 5 s, 1 min, 20 min, or 1 hour. When a time unit is selected, all times generated by the simulation or included in the model must be expressed in terms of this unit. In practice, the values of the model time should be sufficiently small compared to the real time intervals that occur in the simulated system. In this system, the unit of time is usually chosen to be 1 minute.
If during the simulation of some system at the current value of the simulation time its state has changed, then you need to increase the value of the timer. To determine by what amount the timer value should be incremented, use one of two methods:
1. The concept of a fixed increment of timer values.
With this approach, the value of the timer is increased by exactly one unit of time.
Then you need to check the system states and determine those scheduled events that should occur at the new timer value. If there are any, then it is necessary to perform operations that implement the corresponding events, change the timer value again by one unit of time, etc. If the check shows that no events are scheduled for the new timer value, then the timer will move directly to the next value.
2. The concept of variable increment of timer values.
In this case, the condition that causes the timer to increment is the "close event" time. A close event is an event that is scheduled to occur at a point in time equal to the next closest model timer value. The fluctuation of the timer increment from case to case explains the expression "variable time increment".
Usually after some point in time it is necessary to stop the simulation. For example, you want to prevent new customers from entering the system, but you want to continue servicing until the system is free. One way is to introduce a main pseudo-event into the model called "end of simulation". Then one of the functions of the model will be the planning of this event. The point in time, the occurrence of which should cause the simulation to stop, is usually specified as a number. That is, during the simulation, it is necessary to check whether the "simulation end" event is the next event. If "yes", then the timer is set to the time of the end of the simulation, and control is transferred to the procedure that processes the end of the simulation.
The initial data for the development of the program are the time intervals through which the ERE arrive at the first block, the processing time on each block and the simulation time during which it is necessary to study the behavior of the system. The developed program is presented below.
generate 693,34.65
advance 99.6,4.98
advance 450,22.5
advance 248.4,12.42
advance 225,11.25
advance 248.4,12.42
advance 49.8,2.49
The result of the program execution is presented in Appendix A.
From the results obtained, we see that 6 products will be manufactured in one work shift. At the same time, no queue is created at any of the sites, but at the same time, the technological process of manufacturing the device has not been completed at five sites. The obtained values of the equipment load factor and the processing time at each section in the simulation with small deviations correspond to those calculated in the technological part of this graduation project.
Summing up, we conclude that the technological process is designed correctly.
CONCLUSIONS
In the course of the graduation project, the design of a low-frequency amplifier was developed. At the same time, all the requirements of the terms of reference and relevant regulatory documents were taken into account.
In the first section of the graduation project, the initial data were analyzed, the type of production, the stage of development of technological documentation, the type of technological process for organizing production were selected.
A typical technological process was chosen, on the basis of which the PCB assembly TP was formed.
In the second section of the CP, a diagram of the "hard terminal - PCB hole" model was calculated and built. A gripping device has been developed.
In the third section, a block diagram and a modeling algorithm were developed, on the basis of which the technological process of manufacturing a device was modeled using the GPSS language.
LIST OF LINKS
1 GOST 3.1102-81 “Development stages and types of documents”.
2 GOST 3.1109-82 “Terms and definitions of basic concepts”.
3 Technology and automation of the production of REA: Textbook for universities / Ed. A.P. Dostanko.-M.: Radio and communication, 2009.
4 Computer production technology - Dostanko A.P. and others: Textbook-Mn.: Higher school, 2004.
5 Technological equipment for the production of electronic billing aids: Navch. Posibnik / M.S. Makurin.-Kharkiv: HTURE, 1996.
Similar Documents
The effectiveness of the use of means of complex automation of production processes. Principles of construction of robotic systems. Degrees of mobility of the robot arm. Compactness criteria and classification features of industrial robots.
thesis, added 09/28/2015
Automation of glucose-treacle technological process; technical means: hardware platforms, Siemens SCOUT engineering software. Integrated plant management system, selection of quality criteria; industrial ecology.
thesis, added 06/22/2012
Automation of the technological process of boiling at the distillery. Modern automation platform TSX Momentum. Logic controller software. Specification of instruments used in the technological process of food production.
thesis, added 03/19/2014
Automation of technological processes at a gas processing plant. Requirements for the created process control system. Control of the amine sorbent regeneration process. Structural diagram of the automatic control loop; controllers, modular base boards.
thesis, added 12/31/2015
Automation of gas compressor unit control compressor station Surgut field. Characteristics of the technological process. Selecting the controller configuration and software. Development of algorithms for the operation of an automation object.
thesis, added 09/29/2013
Algorithm of the operation of the microprocessor device circuit and the protocol for the exchange of information between it and the control object. Drawing up a memory map for the microprocessor. Development of an assembly language program for the selected microprocessor and microcontroller.
test, added 06/29/2015
Automation of the technological process of the body supply system. Analysis of methods and means of control, regulation and signaling of technological parameters. Selection and justification of technical means, microprocessor controller. Estimation of system stability.
thesis, added 12/31/2015
The main characteristics of the technological control object. The choice of automation tools for the command information output subsystem. Simulation of automatic control system in dynamic mode. Select controller settings options.
term paper, added 03/08/2014
Characteristics, structure, features and technological device of robotic complexes (RC) assembly. The main assembly operations of industrial robots (IR). Dimensions of the working area and control system PR. Typical variants of assembly RTK layouts.
abstract, added 06/04/2010
Description of the technological process of group loading of a tin can in carton boxes. Analysis of methods and means of automating the assembly and packaging process. Equipment, layout of the technological complex, development of a control system.
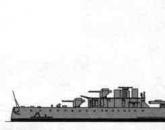


Popular
- Submarines of the Gato type
- Insignia on the merchant fleet of the USSR Detachment of the II group
- How to maximize the speed of your Internet connection Choosing the best browser
- Productive ways to spend time online
- Hiding VKontakte photos
- Tim Berners-Lee - creator of the World Wide Web
- Start in science Net weight of eggs without shell = - - - - - - - - -
- How to delete photos in classmates How to remove tinsel from a photo on classmates
- How to add a photo in a contact?
- Tatyana Gordienko: Other designers copy me and I'm happy about it!